...
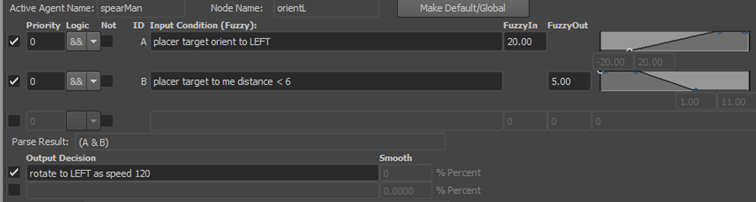
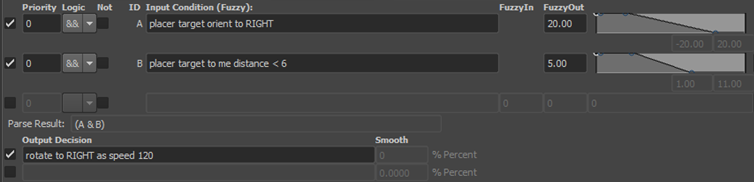
- Create a decision node to stop the agents moving when they close enough to placer. Fill the input decision sentence "Placer Formation>placer target to me distance < ??", it will get the 3d distance between agents and their placer. If the agents are walking on the bumpy ground, there should use the language “Placer Formation>placer target to me 2d distance < ??”.

...
- We can get the result like following pictures
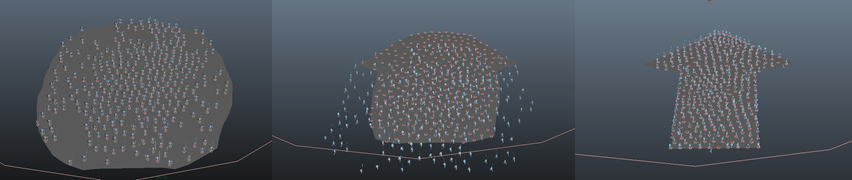
Frame 0, Frame 20, Frame 100
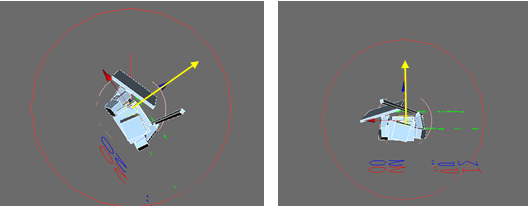
- If we want to make our agents follow the placer orient when they stand, we can use “Placer Formation>placer target orient to LEFT (RIGHT)”, and rotate our agents to match placer target orient.
- the result will be like following pictures