Detection Range Sphere is a useful and effective ways for having our agent to know other agents nearby and usually used to apply agents collision avoidance.
...
With detection sphere language, we can get the nearby agent's position, angle, aiming, relative distance, relative speed information.
...
Note: There's a concept call subjective and objective, like the picture shown above, when we testing agent Y, the "Agent Y" is subjective agent, we call it "current agent (or I) (or My Sphere Range)", and this time "Agent A, B, C and X" are objective agents, we call them "others agents". The engine will iterate calculate every agent in scene, and each one of them have one chance being the "current agent (or I) (or My Sphere Range)"
...
The "(sphere range) someone in my sphere with angle" is testing others agents in horizontal space whereas the the (sphere range) someone in my sphere with up-down angle is testing others agents in vertical space
...
The (sphere range) someone in my sphere aim to angle is testing agents in horizontal space whereas the the (sphere range) someone in my sphere aim to up-down angle is testing agents in vertical space
...
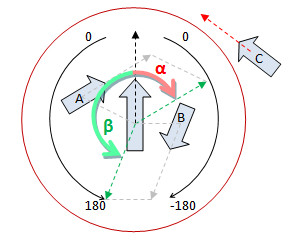
sphere range agents orient example for current agent
someone in my sphere with distance sentence will return the every relative distances between the current agent and the others agents in sphere range.
...
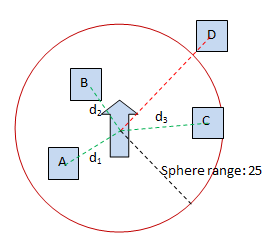
sphere range distance example for current agent
someone in my sphere and his sphere color id sentence will return the each color of agents' spheres in current agent sphere range.
...