Miarmy Crowd Simulation Documentation (English)
Standard Kinematic Primitives
Kinematic primitive is a kind of static RBD objects can be controlled by user animation or constraint. Our agent can collide with them automatically if they enable dynamics.
You can scale, rotate, translate and key frame the kinematic primitive anytime. Or you can parent, constrain them to anywhere.
In this current version of Miarmy, only 2 types of kinematic primitives supported, they are "Box" and "Sphere".
For creating them, just simply click Miarmy > Physics > Kinematic Primitives.
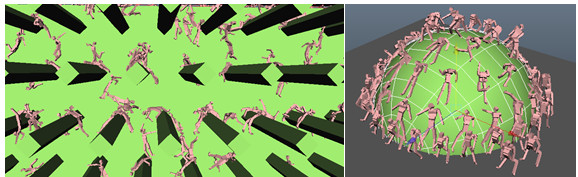
Kinematic Primitive example
You can check collision between agents and kinematic primitives using channel "collide" or if you want agents exclusively check collide with kinematic primitives: "collideBy:_ KINEPRIM_".

Check collide by "collideBy:_ KINEPRIM_" enable dynamic + keyframe kinematic primitive
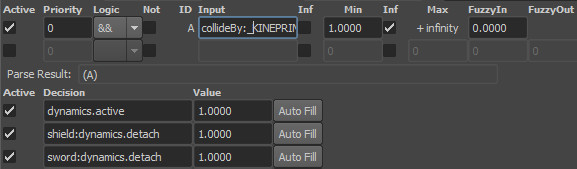
The logic in the above example
Custom Mesh Shape:
Miarmy now only support very simple convex geometry kinematic primitive.
There might be some limitations on the PhysX engine, we'll try to test and support it later.
Simple Convex Mesh Define:
Miarmy > Physics > Kinematic Primitive > Mark Kine Prim Mesh If your geometry is simple enough, it might be OK, or, it will feedback cook error.
Alternative
You can also combine some basic boxes/spheres into a big kinematic primitive combo and then make it like a custom shape.
Basefount Technology