Miarmy Crowd Simulation Documentation (English)
Servo Action and Weigh Distribute

Introduction
In dynamic simulation, our servo force can drive dynamical agent to perform some actions (like struggling) and make them lifelike.
And in the new Miarmy 3.5, our servo force now is able to drive partial dynamical bones of agent and make them play actions, this is going to be useful when we want to achieve the dynamical resititution result when agent is playing back the action.
For example like below pictures, the agents is walking, actually this walk action is driven by servo force. Its bones are all dynamical rigid bodies. and when it contact with kinematic primitive sphere, it will interactive with it. And then when there is no outer rigid bodies, it will reinstitute its action playback.
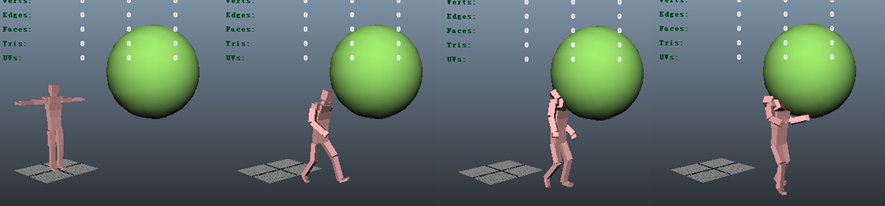
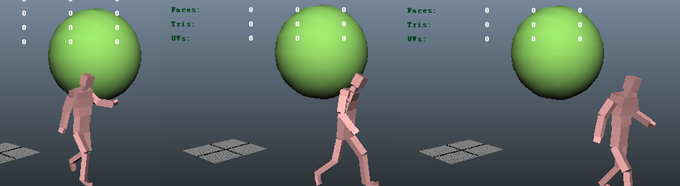
The seven stage of agent walk pass by a sphere
Workflow
- Setup rigid body tree weight distribute factor.
This factor can determine how many times the rigid body weight will lost when setup rigid body down through the children tree.
Please refer the below picture,
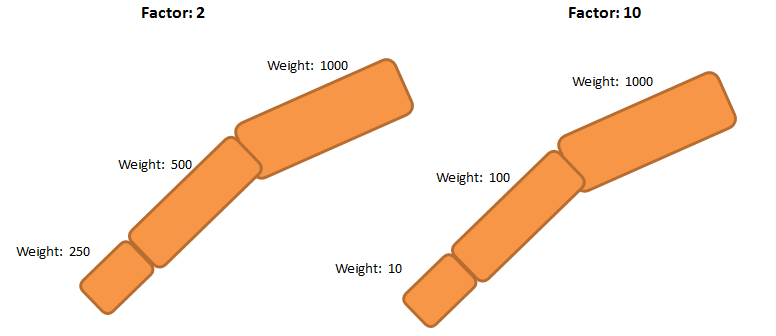
different factor, different weight distribute
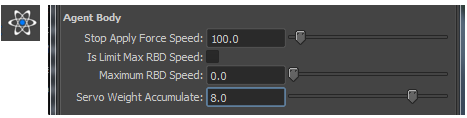
Setup servo weight accumulate factor in Physical Global
- enable body dynamics or partial dynamics when agent is playing back animation.
- enable servo force to watch the result
Basefount Technology