Our agents can detect the road by "road" sentences, also they can detect the road in the reverse direction. And use our "OR" logic setup, our agent can walk on the road bi-directional.
inverse direction, I'm on road and it point to LEFT(RIGHT) (reverse road detection channel)
This sentence is the same as I'm on road and it point to LEFT(RIGHT) but it detected the road by reverse direction, that means if the road direction in my left, this sentence will return the road direction in my right, and also the result degree will be changed.
For example:
- I'm on road and it point to LEFT(RIGHT) will return 30 ( the road point to my LEFT )
- inverse direction, I'm on road and it point to LEFT(RIGHT) will return -150 (the road point to my RIGHT behind)
We usually use the decision node sentences like this:
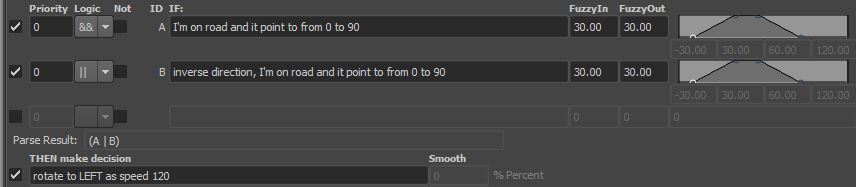
Road point to left logic
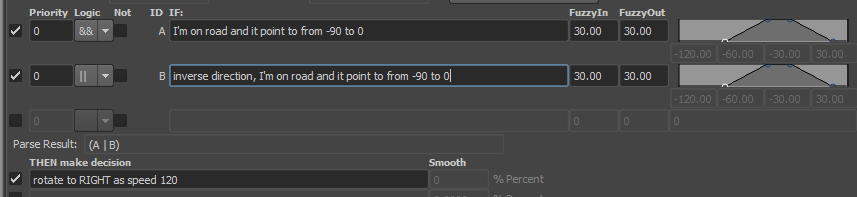
Road point to right logic
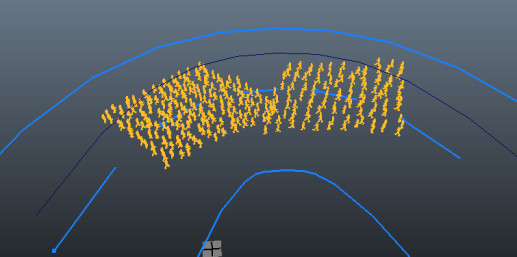
Bi-directional Road