 Flocking Behavior
Flocking Behavior

General
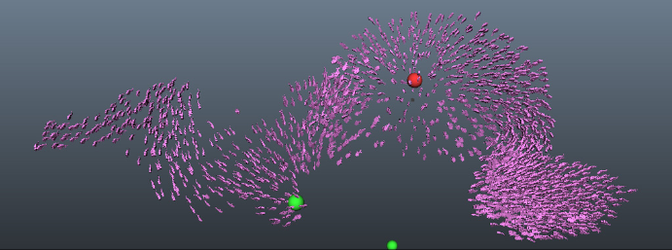
Flocking system allows agents mimic the orientation of a group of nearby agents and achieve the flocking behavior, this can be highly frequently used in animals simulation like birds, fishes or sheep.
Instructions
We can enable the flocking behavior directly in
Output > Direct Logic > start flocking behavior priority 1
And usually (if we're working are 3d creatures like fishes or birds) we need to enable:
Output > Direct Logic > I'm 3d creature
Orientation
Your creature will detect the near agents using its sphere range.
It will automatically calculate the average orientations of all agents in its sphere and rotate to that orientation.
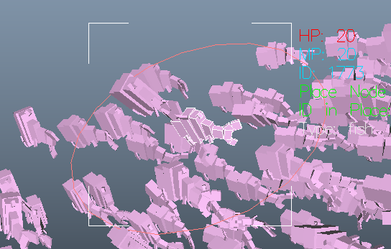
sphere range detection
Convergence
Also, they will try to gether together if the agents
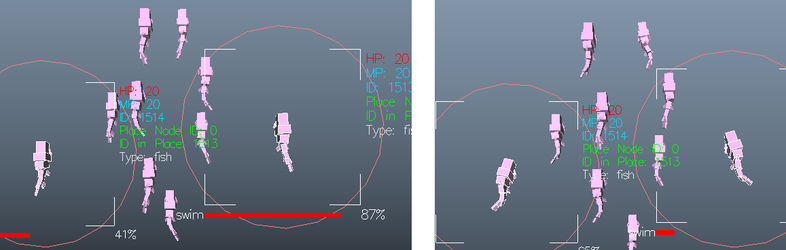 auto convergent
auto convergent
Repel
We are not providing the logic for repel the agent, we can directly use the auto avoid with sphere range Auto Collision Avoid.
So for changing the distance of avoid, we can change the sphere range and smallest radius ratio on Agent group node.
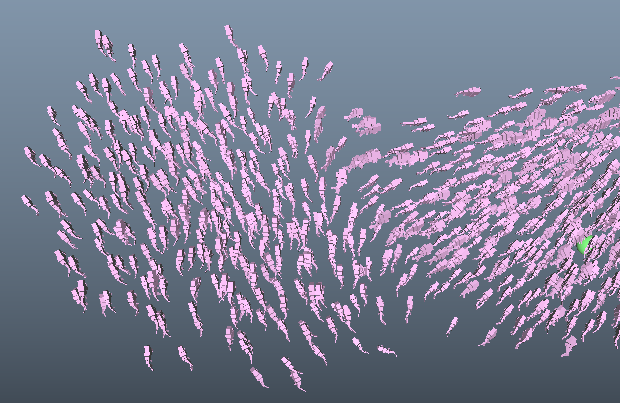
auto avoid by sphere range